

أعلن فريق من الباحثين عن تطوير نموذج روبوتي يعتمد على دراسة دقيقة لحركة الكلاب، خصوصاً في منطقة الكتف التي تتسم بمرونة عالية. تسعى الدراسة إلى نقل التفاصيل الحيوية لهذه الحركة إلى آليات ميكانيكية دقيقة لتحسين أداء الروبوت. يؤكد العمل أن كتف الكلب ليس مرتبطاً مباشرة بالهيكل العظمي، وهو ما يمكّن الحيوان من امتصاص الصدمات وتوزيع القوى أثناء الحركة. يتيح هذا النظام الحيوي حركة سلسة وكفاءة عالية عبر أنواع الأرضيات المختلفة.
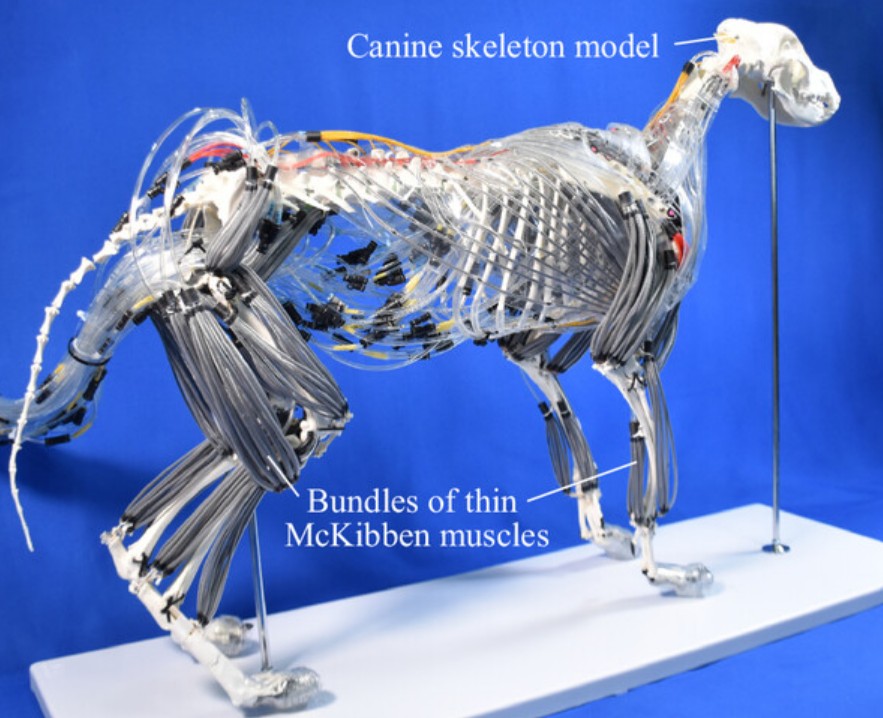
محاكاة للكلب الروبوتي
تُبيّن المحاكاة كيف تعكس الذراع الميكانيكية حركة الكتف الحيواني الواقعية. يتم توظيف نموذج يتيح للروبوت تقليد ديناميكيات الكتف بشكل دقيق، مع إبراز دور جزء الكتف غير المرتبط مباشرة بالهيكل في امتصاص الصدمات. تعكس النتائج قدرة الروبوت على الحفاظ على الاتزان أثناء الحركة وتقليل الاهتزازات مقارنةً بالنماذج التقليدية في محاكاة المشي. وتُبرز الصورة المصاحبة المحاكاة كأداة رئيسية لفهم هذا السلوك.
كتف مرن وتوازن الروبوت
تشير الدراسة إلى أن وجود كتف مرن غير مرتبط مباشرة بالهيكل العظمي يمنح الروبوت قدرة أعلى على امتصاص الصدمات وتوزيع القوى أثناء الحركة. تُنفَّذ هذه الفكرة من خلال استخدام ذراع ميكانيكية تحاكي ديناميكيات الكتف الحيواني وتُطبقها في النموذج الروبوتي. يسهم هذا الترتيب في تعزيز الثبات والتحكم في التوازن على أسطح مختلفة مع تحسين قدرة الروبوت على التكيف مع التضاريس المتفاوتة.
تحسين المشى وتقليل الاهتزازات
بناء على حركة الكتف المستوحاة من الطبيعة، أصبح الروبوت أكثر ثباتاً أثناء المشي وأقل اهتزازاً مقارنة بالنماذج التقليدية. تساهم المحاكاة في رفع كفاءة الحركة وتوسيع نطاق تطبيق الروبوت في بيئات أكثر تحدياً. تشير النتائج إلى إمكانات تطبيق واسعة في مجالات مثل البحث والإنقاذ والتنقل في المساحات الضيقة أو الخطرة.
آفاق الروبوتات المستوحاة من الطبيعة
أوضح الباحثون أن الاعتماد على مبادئ الطبيعة في تصميم المفاصل والأطراف قد يغيّر مستقبل الروبوتات بشكل كبير. يمكن تطوير نماذج قادرة على أداء مهام معقدة مثل عمليات البحث والإنقاذ والتنقل في أماكن خطرة. فهم التفاصيل الدقيقة لحركة الحيوانات يجعل الروبوتات أقرب إلى الحركة الطبيعية للكائنات الحية من أي وقت مضى.


